Odometry for Mobile Robots
What is Odometry?
Odometry is the process of estimating a robot's position and orientation based on data from its motion sensors. In mobile robotics, it typically uses measurements from wheel encoders or other sensors to calculate how far the robot has traveled and in which direction. Odometry is fundamental to tracking a robot’s movement and is a key component of navigation systems.
How Odometry Works
Odometry calculates the position of the robot by integrating the robot's velocity over time. For wheeled robots, this is commonly done using encoders attached to the wheels, which count the number of wheel rotations to determine the distance traveled.
Key Concepts:
- Wheel Encoders: Sensors that measure how far a wheel has turned, providing distance information.
- Velocity: The speed at which the robot moves.
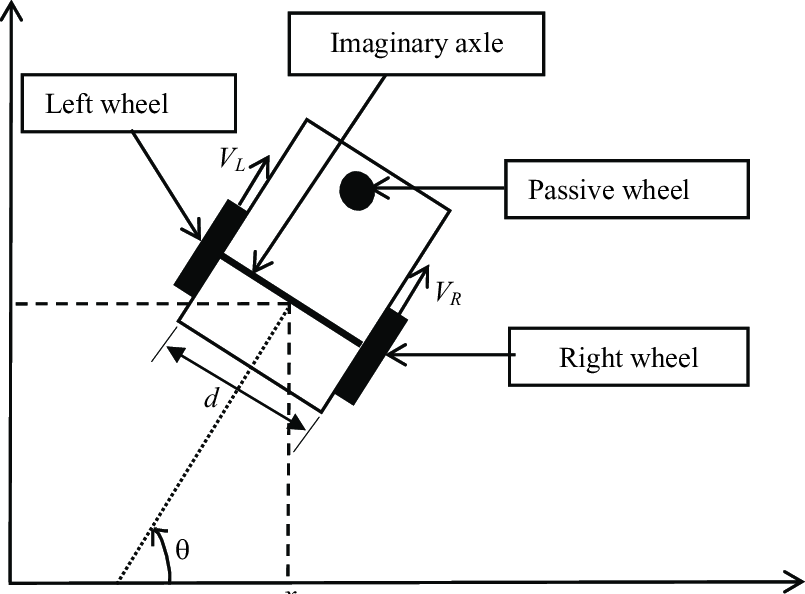
- Heading: The direction the robot is facing, often calculated using differential wheel speeds or an additional sensor like a gyroscope.
The robot's position is computed by taking small time intervals, measuring the movement in each, and summing these changes to obtain the total displacement and orientation of the robot.
Limitations of Odometry
While odometry provides a good approximation of the robot’s position, it suffers from drift over time due to errors such as wheel slippage or uneven terrain. This means the estimated position becomes less accurate the longer the robot moves without correction. Therefore, odometry is often combined with other sensors like LIDAR or IMU to improve accuracy.
Applications of Odometry
- Autonomous Navigation: Used to track the movement of mobile robots in environments without GPS.
- Localization and Mapping: Helps robots estimate their position on a map and contribute to SLAM (Simultaneous Localization and Mapping) processes.
- Motion Planning: Provides information about the robot's movement, enabling smooth and efficient path planning.
Conclusion
Odometry plays a crucial role in robotics navigation by providing real-time positional feedback. Although it has limitations due to error accumulation, it is a critical input for localization algorithms and is often supplemented by other sensor data for more accurate positioning.